Infosaatja mehitamata õhusõidukite aerofotograafia jaoks. Meetod maapealsete objektide õhupildistamiseks vähese valgusega tingimustes, kasutades mehitamata õhusõidukeid
Praegused kasutamise eelised mehitamata õhusõidukid ehitustööstuses ja show-äris muudab selle tegevuse väga populaarseks. See artikkel hõlmab peamisi rakendusvaldkondi aerofotograafia.









Aerofotograafia keerukusest
Rakendus UAV, sai väikeettevõtetele kättesaadavaks suhteliselt hiljuti, kõigest neli aastat tagasi, aerofotograafia tegemiseks oli vaja rentida helikopter või deltaplaan, kui objekt asus linnast väljas. Kõik organisatsioonid ei saanud seda endale lubada, kuid tänaseks on kõik muutunud. Hiinas toodetud mehitamata õhusõidukite tulekuga on õhuuuringute läbiviimise maksumus oluliselt muutunud. Selle põhjuseks on asjaolu, et õhust hakati seda suhteliselt odavalt läbi viima raadio teel juhitavad kopterid. Loomulikult ilmusid kohe turule ettevõtted, mis pakuvad foto- ja videovõtteteenuseid. Tavapäraselt saab eristada kahte laskmissuunda: kergest kvadrokopterist ja raskest heksakopterist. (või oktokopter, vahe on mootorite arvus). Väikesed kvadrokopterid, enamasti DJI Phantom seeriat, kasutatakse aerofotograafiast teatamiseks. Tulemuseks on fotod, mille suurema külje eraldusvõime on 4000 pikslit ehk 12 megapikslit.
Sellised fotod ei sobi printimiseks, kuid neid saab hea kvaliteediga arvutis või esitluses vaadata. Kui aerofotograafia ei nõuta kõrget kvaliteeti nõudvate toodete turustamiseks, siis on see valik enam kui piisav.
Allolevas näites aerofoto kvadrokopterist Phantom 2 ja Go Pro 4 kaamerad.

Tõsisemaks filmimiseks kasutatakse tavaliselt heade objektiividega Canon 5D Mark III kaameraid, mis “lendavad” rasketel kopteritel nagu DJI S1000. Alloleval fotol saate heita pilgu professionaalse aerofotograafia varustusele, mida kasutatakse spetsialiseerunud ettevõtetes.
Fotol olevate objektide detailsusaste on kõrgem. Lõplikud pildid saadakse 5600 suurendusega suuremal küljel, megapikslite arv on 23,4, pikslite arv tolli kohta 300 ja RAW formaadis*. (RAW on pakkimata andmed kaamera sensorilt, mis annab pildistamisel täiendavaid eeliseid.).
Aerofotograafia heksakopterilt saab kasutada trükimaterjalides: teha aerofoto stendidele ja muule välireklaamile, brošüüride trükkimiseks, geodeetiliseks mõõdistamiseks. See pildistamisvõimalus on kõige täpsem ja kallim (tavaliselt on Canon 5D Mark III-ga pildistamise hind 3–4 korda kõrgem). Võimalik on pilti kärpida (ülejääk ära lõigata) ja fotot paremini töödelda.

Aerofotograafia ehituses
Aerofotograafia kasutamine ehituses samm progressi ja arengu suunas üldiselt. Ehitusaegne filmimine, aerofotograafia projekteerimiseks ja katastriks, geoloogilised uuringud, reklaamfotod – kõik need võimalused võimaldavad inimestel peagi luua ebatavalisi ja kvaliteetseid arhitektuuriüksusi, sealhulgas maastikuarhitektuuri. Ala õhust analüüs võimaldab projekteerida suuremas mastaabis, mis annab tõuke linnaosade, parkide ja puhkealade ning uute linnade läbimõeldud taristu väljaarendamiseks.
Ühes oleme kindlad: kõrge hind ei tähenda alati kõrget kvaliteeti.
Sukeldume tööstusesse ja vaatame, kuidas droonid filmimisel toimivad.
Selles uuringus kasutatakse termineid ja spetsiifilist kõnepruuki, kuid need ei sega teie olemusest arusaamist. Selles uuringus töödeldi andmeid DroneDeploy'is ja saadi kõrge geolokatsiooni täpsus 9 cm.
Kirjeldus
Topograafiline mõõdistamine on kõigi maakorraldusprojektide lahutamatu osa.
Selles näites vaatleme maatükki, millele kavatseti ehitada uus küla. Enne töö alustamist oli vaja läbi viia täpne topograafiline uuring mitmel põhjusel:

- Viia läbi esmane maa-arendus, et kujundada veevool äravooluks.
- Võimaliku üleujutuse vältimiseks viia läbi külgneva jõelammi topograafiline uuring.
Kui plaanite avada oma droonifotograafia osakonna, olge valmis selleks, et see on suur investeering ja võite kulutada projektile rohkem aega.
Geodeesia 101
Traditsiooniline topograafiline mõõdistamine nõuab punktide koordinaatide kogumist eelnevalt määratletud ruudustikule. Sel juhul kasutati võrku mõõtmetega 150x150 cm:

Mõõtmised tehti iga 150 sentimeetri järel igal ristmikul:

34,5 hektari suuruselt uuringualalt koguti kokku 1632 koordinaati.
Ilma droonita kiirusega 20 punkti/tunnis (1 punkt iga 3 minuti järel) oleks andmete kogumine kestnud ligikaudu 82 tundi.

82 tundi traditsioonilist mõõdistust tähendab, et insener peab andmete töötlemise alustamiseks ootama vähemalt nädala. Seejärel kulub veel 3-4 päeva, enne kui töö tehtud saab.
Viies sama küsitluse läbi UAV-ga, suutis välimeeskond pakkuda arendajale kiirema ülevaatuse võimaluse.
Esiteks ei olnud vaja kogu ala peale koguda 1600 punkti. Selle asemel oli vaja uurida ainult 10 vaatealal asuvat maapinna markerit:

Suuremate projektide jaoks on maapealsed juhtimispunktid (GCP) kõige parem paigutada võrku.
10 maamärki ehk 1632 punkti:

1-2 tunni jooksul saab teha 10 võrdlusmärki.
Fotogrammeetriaga kursis olevad inimesed teavad, et veepinnalt kogutud punktid ei ole sellistel uuringutel kasutamiseks vastuvõetavad.
Pärast GCP kogumise lõpetamist koguti punkte traditsioonilisel meetodil seisva veega piirkondades - kahe ülalkirjeldatud meetodi kombinatsiooni.
Viimased kogutud punktid:

Selle tulemusel saime 117 punkti (10 GCP + 107 seisva veega aladel).
Pildistamise aeg:
Teoreetiliselt: 10 maamärki + punktide kogumine = 1-2 tundi
Tegelikult: 117 punkti (10 GCP + 107 seisuveepiirkondades) kogumiskiirusega 20 punkti/tund = 5,85 tundi
Traditsiooniline meetod: 1632 punkti kogumismääraga 20 punkti/tund = 81,6 tundi

Tunni jooksul viidi lõpule kõik tegevused UAV-ga, sealhulgas kokkupanek, lennueelne kontroll, start, maandumine, lahtivõtmine ja esialgne kaardi õmblemine.

Nii saime:
UAV (1 tund) + punktide kogumine (5,8 tundi) =
Kogu väliaeg: 6,8 tundi
Võrdlus:
34,5 ha / välitööd UAV-dega = 6,8 tundi
34,5 ha / välitööd traditsioonilisel meetodil = 81,6 tundi
Kokkuhoid: 74,8 tundi
Andmete analüüs
Pärast välitöid vajavad saadud andmed hoolikat töötlemist. Esmalt töödeldakse maandusjälgi ja nende asend tuleb täielikult reguleerida.
Järgmiseks tuleb kohandatud punktid (.las-fail) eksportida, et luua topograafiliste andmete baas. Kuid .las-faili suur punktide arv tähendab, et esialgsed topograafilised kontuurid tulevad üsna konarlikud:

Kontuure tuleb siluda, et hiljem luua ühtlane joon ilma täpsust kaotamata. Vastasel juhul on saadud andmed kasutuskõlbmatud.
Pärast 2-päevast täiendavat töötlemist olid saadud topograafilised kontuurid 9 sentimeetri täpsusega nii horisontaalselt (X, Y) kui ka vertikaalselt (Z):


Projekti üldised tähtajad:
UAV meetod:
Välitööd (6,8 tundi) + andmetöötlus (24 tundi) =
30,8 tundi (umbes 4 päeva)
Tavaline meetod:
Välitööd (81,6 tundi) + Andmetöötlus (24 tundi)=
105,6 tundi (umbes 13 päeva)

Droonitehnoloogia abil sai insener lõpliku topograafilise uuringu ligikaudu 75 tunniga
Saadud andmete põhjal selgus, et:
1. Täiendav maa-arendus on vajalik jäätmekanalisatsiooni rajamiseks madalatel aladel, kus vett kinni hoitakse.
2. Töötajad saavad nüüd tõhusalt ennustada ja planeerida teede, majade jms ehituskuupäevi – see aitab töid õigeaegselt lõpetada.
3. Insener on õppinud tundma odavat ja kulutõhusat mehitamata õhusõidukite mõõdistamist ning kavatseb seda meetodit uuesti kasutada, et lähinädalatel läbi viia lõplik “manustatud” topograafilise uuringu.
Siit leiad rohkem ja paremaid droonimudeleid.
Artikli “MEhitamata õhusõidukid: KAARDISTAMISEKS AEROFOTOGRAAFIA TAOTLEMINE” esimene osa käsitles üldteooria küsimusi: vaadati üle olemasolevad UAV-tüübid, anti selgitusi nende kasutamisega seotud peamiste terminite kohta ning anti ülevaade mitmest UAV-st. anti aerofotograafias kartograafilisel eesmärgil edukalt kasutatud mudelid .
Artikli teises osas käsitletakse mehitamata aerofotograafia fotogrammeetrilise töötlemise funktsioone, antakse soovitusi selle rakendamiseks ning UAV pardale põhi- ja lisaseadmete paigaldamiseks maksimaalse täpsuse saavutamiseks.
A.Yu. Sechin, M.A. Drakin, A.S. Kiseleva, “Rakurs”, Moskva, Venemaa, 2011.
UAV aerofotograafia andmete omadused
UAV-st aerofotograafia ei erine põhimõtteliselt "suurelt lennukilt" pildistamisest, kuid sellel on teatud omadused, mida me täiendavalt kaalume. UAV lend toimub reeglina reisikiirusel 70–110 km/h (20–30 m/s) kõrgusvahemikus 300–1500 m Pildistamiseks mittemeetrilised kodukaamerad Tavaliselt kasutatakse maatriksi suurusega 10-20 megapikslit. Kaamerate fookuskaugus on tavaliselt umbes 50 mm (35 mm ekvivalent), mis vastab maapinna piksli suurusele (GSD) 7–35 cm.
Sageli töödeldakse mehitamata õhusõidukitelt pärit pilte lihtsate, mitte rangete meetoditega (piltide afiinne teisendamine tasapinnaks). Selle tulemusena saab kasutaja küljendusmontaažid, mis lisaks madalale täpsusele võivad sisaldada kontuurikatkesi kõrvuti asetsevate piltide ristmikel.
Selles artiklis lähtume mehitamata õhusõidukist mõõdistamise funktsioonide kaalumisel ja selle rakendamiseks soovituste koostamisel rangest fotogrammeetrilisest andmetöötlusest, mille tulemusel võime eeldada saadud tulemuste (tavaliselt ortofotoosade) täpsust. ühe GSD tellimus. Ülaltoodud laskmisparameetrite juures vastavad tulemused olenevalt laskekõrgusest mõõtkavade ortomosaiikidele vahemikus 1:500 kuni 1:2000.
Õhuuuringu andmete rangeks fotogrammeetriliseks töötlemiseks ja kõige täpsemate tulemuste saamiseks on vajalik, et ühe marsruudi kujutised kattuksid kolmekordselt ja külgnevate marsruutide piltide kattumine ala uuringu ajal oleks vähemalt 20%. Praktikas UAV-st pildistades neid parameetreid alati ei järgita. UAV lend ei ole stabiilne, seda mõjutavad tuuleiilid, turbulents ja muud häirivad tegurid. Kui tavalennukitega mõõdistamine on planeeritud marsruudil 60% kattuvusega ja marsruutide vahel 20-30%, siis mehitamata õhusõidukist mõõdistamine peaks olema kavandatud kattumisega marsruutidel 80% ja marsruutide vahel - 40%. selleks, et võimalusel kõrvaldada fototriangulatsiooniplokis olevad tühimikud
UAV-d on tavaliselt varustatud Canoni digikaameratega. Selle põhjuseks on selle ettevõtte kaamerate elektroonilise juhtimise lihtsus. Kodukaamerate kasutamisel on nii eeliseid (madal hind, asendamise lihtsus "kõva maandumise ajal") kui ka puudusi.
Peamine miinus on see, et kodukaameraid pole algselt kalibreeritud – nende täpsed fookuskaugused, põhipunkt ja moonutus on teadmata. Samal ajal võivad igapäevaseks pildistamiseks vastuvõetavad mittelineaarsed optilised moonutused (moonutus) ulatuda mitmekümne pikslini, mis vähendab töötlemistulemuste täpsust suurusjärgu võrra. Selliseid kaameraid saab aga kalibreerida laboritingimustes, mis võimaldab saada peaaegu samasuguse töötlustäpsuse kui professionaalsete väikeseformaadiliste fotogrammeetriliste kaamerate puhul.
Sellistele kaameratele on eelistatav paigaldada fikseeritud fookuskaugusega objektiivid. Pildistamisel tuleks seada fookus lõpmatusse ja lülitada autofookuse funktsioon välja.
UAV-del kasutatavate kaamerate teine miinus puudutab just Canoni kaameraid – erinevalt professionaalsetest fotogrammeetrilistest kaameratest kasutatakse nendes pilu katikut, mille tulemusena toimub pildi erinevate osade säritamine erinevatel aegadel ja vastab meediumi erinevatele asukohtadele. . Seega, kui pildistamisel on säriaeg 1/250 s, siis UAV kiirusel 20 m/s on kaamera nihe kaadri pildistamisel 8 cm, mis on võrreldav madalal pildistamisel pildistamise eraldusvõimega ja põhjustab täiendav süstemaatiline viga pildil. Sellised vead võivad akumuleeruda fotogrammeetrilise paksenemise (võrdsustamise) käigus laiendatud alade mõõdistamisel. Selle efekti mõju vähendamiseks ja uduste piltide kõrvaldamiseks tuleks UAV-st pildistada võimalikult väikese säriajaga (mitte kauem kui 1/250 s, maksimaalne säriaeg sõltub kõrgusest). Osaliselt saaksid pilustiku probleemi lahendada keskse katikuga kaamerad, mille objektiivi ja maatriksi kvaliteet on võrreldav Canoni kaameratega. Hägususe vältimiseks tuleks säriaegu siiski piirata.
Nii amatöör- kui ka professionaalsete digikaameratega tehtud pildid on ristkülikukujulised. Kaamera on “soodsam” paigutada nii, et pildi pikem külg asetseks üle lennu – see võimaldab sama pikkusega marsruudiga pildistada suuremat ala. Pildistamine peaks toimuma maksimaalse kvaliteediga – minimaalse jpeg-tihendusega või RAW-vormingus, kui viimane on võimalik.
Praegune navigatsioonivahendite arengutase võimaldab mõõta väliseid orientatsioonielemente (EOE) vahetult uuringu käigus. Selliste mõõtmiste tüüpiline täpsus ulatub ruumilistes koordinaatides X, Y ja Z mitme sentimeetrini ning kalde-, kalde- ja kaldenurgas 0,005 kraadini kõige täpsemate ApplanixPOSAV süsteemide jaoks, mis on paigaldatud "suurtele lennukitele". Sageli piisab sellest töötlemiseks ilma võrdluspunkte kasutamata. Igal juhul lihtsustab selliste andmete kättesaadavus töötlemist oluliselt ja võimaldab mõningaid töötlemisetappe sooritada täiesti automaatselt. Kaasaegsed edusammud mikroelektroonikas võimaldavad mehaanilise (täpsemalt MEMS – elektrooniline-mehhaaniline) güroskoopi kokku panna mitme mm suuruses korpuses, mis maksab alates 250 dollarist. Sellised güroskoobid ei taga professionaalsete täpsust ja nõuavad töö ajal märkimisväärset hooldust (suurusjärgus üks kraad tunnis), kuid lihtsustavad oluliselt hilisemat andmetöötlust. Ptero E4, Dozor 50 standardtarnetega saab selliseid väikese suurusega inertsiaalsüsteeme - IMU pardale paigaldada (LLC välja töötatud IMU paigaldatakse Dozor-50-le
"Transaz Telematics") ja ülitäpne kaheribaline GPS (TOPCONeuro160 Ptero-E4-l, sisseehitatud GLONASS/GPS-vastuvõtja Dozor-50-l). Nende GPS-seadmete arvestuslik täpsus on plaanis 10 mm + 1,5 mm × B (B – kaugus tugijaamast km) ja kõrguselt 20 mm + 1,5 mm × B. Kahjuks paigaldatakse UAV-de pardale tavaliselt odavamad GPS-vastuvõtjad ja IMU-andureid ei paigaldata. Andmed piltide projitseerimiskeskmete kohta telemeetriainfos võetakse NMEA protokolli kaudu ja on sel juhul kuni 20-30 m täpsusega ning kalde-, kalde- ja lengerdusnurgad arvutatakse GPS-mõõtmiste kiirusvektori kaudu. Sellise telemeetria teabe pöördenurga täpsus on madal ja võib ületada 10 kraadi ning väärtused ise sisaldavad süstemaatilisi vigu, mis raskendab hilisemat andmetöötlust.
Kui pildistamise ajal kasutati diferentsiaalrežiimis (või GPS-andmete PPP-töötlust) töötavat kaheribalist GPS-vastuvõtjat, siis kõige täpsemate töötlustulemuste saamiseks piisab tavaliselt 1-2 punktist 100 pildi kohta mõnel juhul saab töötlemist läbi viia ilma kontrollpunktideta. Juhul, kui täpsed projektsioonikeskused puuduvad, on plaani kõrguse põhjendatuse nõuded standardsed: üks plaan-kõrguspunkt 6-10 mõõdistusaluse kohta.
UAV-de aerofotograafia andmete fotogrammeetrilise töötlemise eripära
UAV-dest tehtud aerofotograafia töötlemine digitaalsetes fotogrammeetrilistes süsteemides (DPS) on üldiselt sarnane "suurte lennukite" aerofotograafia töötlemisega. UAV-st pärinevate andmete iseärasused aga ei võimalda sageli kasutada standardpakettide automaatseid protseduure – osa toiminguid (näiteks sidepunktide paigutamine) tuleb teha käsitsi. Allpool vaatleme mehitamata õhusõidukist tehtud aerofotograafia töötlemise funktsioone digitaalses failisüsteemis PHOTOMOD5.2. Just selles PHOTOMOD-i versioonis on selliste andmete töötlemiseks kasutusele võetud erifunktsioonid, mis oluliselt lihtsustavad ja automatiseerivad lõpptoodete tootmist.
Nagu ka muude andmete töötlemisel, luuakse CFS-is esmalt projekt, sinna sisestatakse pildid ja telemeetriainfo. Projektsioonikeskmete ja nurkade andmete põhjal koostatakse ploki paigutus ja jagatakse see marsruutideks. UAV pööretel tehtud pildid kustutatakse käsitsi. Välise orientatsiooni ebatäpsed nurgaelemendid põhjustavad üsna konarliku ploki paigaldamise (joonis 1):
Riis. 1. Plokkide paigutus vastavalt telemeetrilisele teabele
Automaatne sidepunktide otsimine on sellistel juhtudel keeruline või nõuab palju arvutiaega. Plokkide paigutuse selgitamiseks sellistel juhtudel kasutab PHOTOMOD CFS nn. “automaatne ploki paigutus”, mis määrab piltide suhtelise asukoha (joonis 2).

Riis. 2. Bloki paigutus pärast automaatset täpsustamist
Nagu me varem märkisime, toimub UAV-st filmimine suurenenud kattumisega. Lennuki lennu ebastabiilsus võib mõnikord põhjustada kõrvuti asetsevate piltide väga suuri kattumisi, mis põhjustab standardsete fotogrammeetriliste pakettide puhul raskusi.

Riis. 3. Piltide “segadus” väikese pildistamispõhimõttega
Kõrvalkaadrite pildistamise erinevad nurgad ja kõrgused toovad kaasa sidepunktide otsinguala suurenemise ja jämedate vigade arvu suurenemise võrreldes tavaliste õhulendudega. Pärast täiustatud plokipaigutuse loomist viiakse läbi sidepunktide automaatse mõõtmise protseduur. Esimestel läbimistel määratakse uuesti ploki paigutus:

Riis. 4. Plokkide paigutus pärast sidepunktide automaatse mõõtmise esimesi läbimisi
Järgmistel läbimistel tehakse sidepunktide täiendavad mõõtmised. Mitu läbimist on vajalik, kui telemeetria teave ei sisalda kõiki orientatsiooninurki või nurgad on teada 10-30 kraadise täpsusega. Kui telemeetriline teave sisaldab mitme kraadiühiku täpsusega nurgaorientatsiooni elemente, siis piisab ühest läbimisest - automaatsete mõõtmiste usaldusväärsus sel juhul suureneb. Võitlemaks võimalike jämedate vigadega automaatmõõtmistel, võttis PHOTOMOD5.2 kasutusele kontseptsiooni nn. "viispunktide usaldusgrupp", kui programm otsib väikseima põikparallaksiga stereopaaride jaoks suurimat arvu sidepunkte, loetakse ülejäänud sidepunktid, mis rühma ei kuulu, vigaseks.
Pärast side- ja kontrollpunktide mõõtmist viiakse läbi reguleerimisprotseduur. Rakenduses DFS PHOTOMOD saate reguleerimisalgoritmi jaoks kasutada esialgset lähendust nii viimistletud plokkskeemi järgi kui ka muude meetoditega konstrueerituna. Alates versioonist 5.2 soovitame UAV-st aerofotograafia reguleerimiseks kasutada uut režiimi - 3D reguleerimist. PHOTOMODis ja piisava arvu kontrollpunktide reguleerimisel saab kasutada enesekalibreerimist. See võimaldab kasutada kalibreerimata kaameraid. Väljundtulemuste eeldatav täpsus range fotogrammeetrilise töötlemisega on ligikaudu 1-2 GSD horisontaalselt ja 2-4 GSD vertikaalselt. Pärast fotogrammeetrilist reguleerimist, mille tulemused määravad väljundproduktide täpsuse, konstrueeritakse automaatselt reljeef (DEM). Vajadusel saab peale reguleerimist teha stereo vektoriseerimise – hoonete, rajatiste, sildade, tammide ja muude objektide käsitsi joonistamine. Ehitatud reljeefi kasutatakse kujutiste ortorekteerimiseks. Viimases etapis luuakse ortorekteeritud kujutistest õmblusteta mosaiik - arvutatakse lõikejooned, võrdsustatakse heledus ja liidetakse kontuurobjektid. Isekalibreerimist saab lubada ka võrdluspunktide puudumisel, kuid sel juhul saab arvutada ainult radiaalmoonutuskoefitsiente k1, k2. Pilukatikuga kaamerate kasutamisel saate valikuliselt lubada afiinsete moonutuste arvutused. Kui orientatsiooninurgad on mõõdistamise ajal stabiilsed, võib selline isekalibreerimine suurendada reguleerimise täpsust.
Kui kasutatakse kalibreerimata kaamerat ja võrdluspunkte pole, siis saame rääkida mitmekümnemeetrisest täpsusest, mille määrab täpsus
GPS-i projektsioonikeskused ja objektiivi moonutused (kuni mitukümmend pikslit). Sellistel juhtudel saab kasutada lihtsustatud automatiseeritud töötlemisjärjestust. Määratud täpsusega sujuv plokkide paigaldamine saavutatakse PHOTOMODGeoMosaic moodulis olevate originaalpiltide teisendamisel. Sel juhul kasutatakse kõige lihtsamaid teisendusmeetodeid, mis ei võta arvesse maastikku, ja kontuuride ühendamine toimub automaatselt arvutatud sideme abil. punktid mööda automaatselt konstrueeritud lõikejooni.
Näited UAV-de aerofotograafia andmete fotogrammeetrilisest töötlemisest
Vaatame mitmeid näiteid UAV-st tehtud aerofotograafia töötlemisest. Kõigis näidetes kasutati töötlemiseks digitaalset failisüsteemi PHOTOMOD. Tuleb märkida, et erinevad organisatsioonid andsid UAV-delt üle 20 aerofotograafia ühikut testimiseks ettevõttele Rakurs. Kahjuks puudusid paljudel plokkidel võrdluspunktid ja/või uuring viidi läbi kalibreerimata kaameratega. Sellistel juhtudel oli lõplike töötlemistulemuste täpsust võimatu hinnata.
Esimene plokk, mida me kaalume, eemaldati UAV-st ZALA421-04f. Uurimisandmed edastas lahkelt Gazprom Space Systems OJSC. Plokk koosnes 26 trassist. Pilte oli plokis kokku 595. Kasutati eelkalibreeritud digitaalkaamerat Canon EOS500D. Lennu kõrgus üle maastiku oli ca 500 m, pikslite suurus maastikul ligikaudu 8 cm. Maastikule mõõdeti ja märgiti 25 võrdluspunkti, võrdluspunktide koordinaatide täpsus ei ületanud 10 cm. Maastiku kõrguste koguvahe umbes 3 kilomeetri pikkusel pikkusel on üsna suur ~ 70 meetrit.
Esiteks töödeldi sama aerofotograafia plokk automaatselt lihtsustatud skeemi järgi, ilma reguleerimise ja kontrollpunkte kasutamata. Köitmine viidi läbi projektsiooni keskpunktides, kujutiste teisendamine viidi läbi koheselt GeoMosaic moodulis ilma reljeefi arvestamata. Saadud “pseudo”-ortomosaiikide hilisem jälgimine võrdluspunktide abil näitas võrdluspunktides lahknevusi, mis ületasid 17 m.
Seejärel töödeldi plokiga ranget fotogrammeetrilist töötlemist. Reguleerimise ajal loeti kontrollpunktideks kolm mõõdetud kontrollpunktist. Reguleerimise ruutkeskmine viga oli kontrollpunktides 15 cm, 16 cm, 12 cm, kontrollpunktides 23 cm, 29 cm ja 57 cm. Võrdluspunktides olid lahknevused 8 cm, 14 cm ja 69 cm Ploki üldvaade on toodud järgmisel joonisel.

Riis. 5. „Ploki 1” üldvaade
Kohandamise käigus avastati, et telemeetrilise teabe projektsioonikeskmete koordinaadid sisaldavad süstemaatilist viga, mille põhikomponendiks on 10,5 meetrit kõrgust Z. Projektsioonikeskmete ruutkeskmised vead pärast projektsioonikeskmete lahutamist süstemaatilised vead olid 84 cm, 239 cm ja 75 cm. Oluliselt suur viga Y-s (lennu ajal) on tõenäoliselt tingitud võttehetkede ebatäpsest määramisest telemeetrias. Suured Z vead sidepunktides on tõenäoliselt tingitud kaamera ebatäpsest kalibreerimisest ja akumuleeritud veast pilukatikuga kaameraga pildistamisel. Suurimad vead sidumispunktides ilmnevad kujutiste servades ja nurkades.

Riis. 6. Vigade väärtused sidepunktides
Ploki edasine töötlemine viidi läbi vastavalt standardskeemile. Reljeef ehitati automaatrežiimil ja ortotransformatsioon tehti konstrueeritud reljeefi arvestades. Konstrueeritud ortofoto fragment on näidatud järgmisel joonisel. Selle fragmendi koostamisel ei olnud heleduse võrdsustamise funktsioon spetsiaalselt sisse lülitatud, et demonstreerida külgnevate piltide kontuuride kokkulangevust.

Riis. 7. Ortomosaiikfragment ilma heleduse võrdsustamiseta
2011. aasta aprillis viis Moskva Riikliku Geodeesia ja Kartograafia Ülikooli (MIIGAiK) fotogrammeetria osakond läbi Ptero UAV abil saadud aerofotomaterjalide uuringud, et hinnata aerofotograafia ja fotogrammeetrilise töötluse kvaliteeti. Pildistamine viidi läbi umbes 900 m kõrguselt Ptero UAV-st pildistatava ala keskmisest tasapinnast CanonEOS5D digikaameraga. Kaamera on eelnevalt kalibreeritud. Materjalide kvaliteedi hindamiseks kasutati ploki fragmenti, mis koosnes 2 marsruudist, millest igaühel oli 6 pilti. Võrdluspunktidena kasutati 14 punkti, mille plaanikoordinaadid XY võeti plaanidelt mõõtkavas 1:1000 ja kõrgus Z määrati õhulaserskaneerimise materjalidest, mis teostati umbes 20-30 cm täpsusega. Pärast fotogrammeetrilist reguleerimist on koordinaatide ruutkeskmised vead võrdluspunktides X, Y ja Z vastavalt 20 cm, 21 cm ja 50 cm olid 6 cm, 6 cm, 15 cm. Selle GSD ploki pikslite suurus on umbes 12 cm. Ploki üldskeem on näidatud järgmisel joonisel.

Riis. 8. Ploki 2 skeem koos võrdlus- ja ühenduspunktidega
Metroloogilise toe küsimused
Üldiselt näitab UAV-de kasutamine aerofotograafiaks ja kartograafilise täpsusega materjalide hankimiseks kuluefektiivsust ja toimib. Sellise aerofotograafia laialdane rakendamine nõuab nii UAV-tootjate kui ka neid opereerivate kasutajate ning digitaalsete fotogrammeetriliste süsteemide arendajate jõupingutuste kooskõlastamist.
Üks piirav tegur mehitamata õhusõidukite rakendamisel ülalloetletud probleemide lahendamisel on praktilise kogemuse puudumine nende kasutamisel enamikus organisatsioonides, samuti teoreetiliselt põhinevate soovituste puudumine UAV-de mõõdistusseadmete ja parameetrite valimisel. nende abiga tehtud aerofotograafia.
Olgu siinkohal märgitud üks huvitav MIIGAiK projekt - mehitamata aerofotograafial põhinevate ala seire- ja kaardistamistehnoloogiate arendamiseks ja uurimiseks on alanud töö spetsialiseeritud uurimisobjekti loomisel. See prügila, mille pindala on umbes 50 ruutmeetrit. km, luuakse Tula oblastis Zaoksky rajoonis Moskvast 110 km kaugusel asuva õppegeoloogilise saidi MIIGAiK baasil.
Polügooni territoorium esindab ainulaadset sorti kartograafilisi objekte. Sellel territooriumil on mitmesuguseid asulaid: linna tüüpi asulaid, külasid, maa- ja suvilaasulaid; teedevõrk raudteede, maanteede, maateede ja põlluteedena; erineva pingega elektriliinid; torujuhtmed. Prügila territooriumil asuvad metsad, erinevad hüdrograafilised objektid, mitmekesised pinnavormid, põllumaad ja tootmisrajatised.
UAV-de kasutamisel põhinevate tehnoloogiate arendamise ja uurimise tagamiseks on katseplatsi territooriumil alustatud tööd ülitäpse plaani-kõrgusmärgistuse võrgustiku loomiseks (looduslike maastikukontuuride ja märgistusena) ; Teostatakse maastikule iseloomulike alade topograafilisi maapinna uuringuid mõõtkavas 1:500 ja 1:2000. Samale territooriumile on koostatud aerofotograafia ja kõrglahutusega satelliidipiltide põhjal ortofotokaardid ja digitaalsed maastikumudelid. Uute filmimismaterjalide ilmumisel hakatakse neid töid eeldatavasti teostama ooterežiimis.
UAV abil saadud piltide visuaalsete omaduste hindamiseks rakendatakse katseplatsil radiaalseid maailmu.
Esimesed katsetused on kavas läbi viia 2011. aasta juuli keskpaigas. Plaanis on läbi viia katseala katseaerofotograafia erinevates mõõtkavades, kasutades kodumaist UAV-d "PTERO", et katsetada ja uurida fotogrammeetrilist tehnoloogiat erinevate kaartide koostamiseks. skaalasid kasutades saadud aerofotograafia materjale. Saadud kujutiste fotogrammeetriline töötlemine peaks toimuma digitaalse fotogrammeetrilise süsteemiga PHOTOMOD. Septembris on plaanis testida Belgia ettevõtte Gatewing UAV-d X100 ja MIIGAiKis välja töötatud UAV-d MIIGAiK X8.
MIIGAiK kavatseb testimisplatsi loomise ning UAV-de ja nende kasutusel põhinevate tehnoloogiate testimisega aidata potentsiaalsetel kasutajatel uusi tehnoloogiaid omandada ja juurutada ning lennuki- ja kaamerasüsteemide arendajatel neid praeguste tootmisprobleemide lahendamiseks kohandada.
UAV-de kasutamisel õhuvaatlusplatvormina on suured väljavaated väikese ala objektide ja lineaarsete objektide pildistamisel. UAV-de andmed võimaldavad hankida kvaliteetseid kartograafilisi materjale (ruumiandmeid) järgmistel tingimustel:
· teatud (üsna teostatavate) nõuete täitmine filmimistehnikale ja filmimisprotsessile (lagede piisavuse garantii);
· Range fotogrammeetriline töötlemine. Sel juhul suureneb täpsus kümneid kordi ja võib olla umbes GSD, nagu tavaliste aerofotode ja satelliidipiltide puhul.
Meie soovitused uuringutulemuste maksimaalse täpsuse saavutamiseks on mõeldud nii mehitamata õhusõidukitega kasutajatele kui ka droonidele seadmeid paigaldavatele disaineritele ning on järgmised.
· Kasutage UAV-del kalibreeritud kaameraid.
· Pildistage säriajaga, mis ei ületa 1/250 s.
· Kasutage fikseeritud fookuskaugusega objektiive. Kui see pole võimalik, peaksite suurendamise fikseerima (Suum). Pildistamine peaks toimuma lõpmatusse teravustamisega ja automaatse teravustamise režiimiga.
· Suurendatud kattuvusega kavandatud mõõdistamine (80% piki, 40% kogu trassi ulatuses).
· Soovitav on kasutada keskse katikuga kaameraid.
· Soovitav on kasutada kaheribalisi GPS-vastuvõtjaid pardal ja diferentsiaalmõõtmise režiimi.
· Pardal on soovitatav kasutada IMU-d, isegi kui see ei ole kõrge täpsusega.
Tänuavaldused
Täname järgmisi ettevõtteid: “Unmanned Systems ZALA AERO”, OJSC “Gazprom Space Systems”, “AFM-Servers”, LLC “Geometer-Center”, NPI ja CC “Zeminform”, CJSC “Transas”, CJSC “Limb” abi materjali ettevalmistamisel, andmete edastamisel ja kasulikel aruteludel.
Kirjandus
1. Tšibunitšev A.G., Mihhailov A.P., Govorov A.V. Digikaamerate kalibreerimine: ROFDZ teine teaduslik ja praktiline konverents. Aruannete kokkuvõtted. M., 2001, lk 38-39.
2. Skubiev S.I., Riikliku Maakorraldusülikooli “Zeminform” Maainfotehnoloogiate Uurimis- ja Tootmisinstituut (Venemaa), Mehitamata õhusõidukite kasutamine kartograafia eesmärkidel. 10. aastapäeva rahvusvahelise teadus- ja tehnikakonverentsi “From Image to Map: Digital Photogrammetric Technologies” kokkuvõtted. Gaeta, Itaalia, 2010.
3. UAV Ptero väliuuringute tulemused
UAV-põhine aerofotograafia tehnoloogia koosneb järgmistest etappidest:
1) ettevalmistustööd;
2) välitööd;
3) kontoritöö.
2.1 Ettevalmistustööd UAV-dega aeropildistamiseks
Ettevalmistustööd hõlmavad:
tehniliste kirjelduste vastuvõtmine ja täpsustamine;
andmete kogumine ja süstematiseerimine - kartograafilised või fotomaterjalid, GHS punktide või piirivõrgu koordinaatide loendid jne;
tööpiirkonna füüsiliste ja geograafiliste omaduste analüüs - mets, mägi, vesi, keskmine temperatuur jne;
tehnilise projekti ja kaardi (skeemi) väljatöötamine, millel kuvatakse tööalade piirid, valmimise tähtaeg, planeeritud plaani-kõrguse punkti määramiseks piltide ettevalmistamine;
maapealses juhtimisjaamas andmete arvutamine ja sisestamine: mõõdistuskõrgused, piki- ja põiksuunaline kattumine, mõõdistuspiirid, lähteasendi asukoht kõige kõrgemal asuvate objektide suhtes, maandumiskoha valik;
piltide plaani-kõrguse ettevalmistuspunktide valik (referents- ja kontrollpunktid), samuti nende punktide koordinaatide määramise meetodi valik;
lennu läbiviimiseks loa saamine;
instrumentide ja seadmete tehniline kontroll ja ettevalmistamine tööks;
akude ülevaatus ja laadimine.
2.2 Aerofotograafia välitööd UAV-de abil
Välitööd sisaldavad:
geodeetilised (planeerimise ja kõrguse ettevalmistamise) tööd - ajutiste tugijaamade ja õhutõrjepunktide koordinaatide määramine;
aerofotograafia tööd – lennumissiooni ettevalmistamine, aerofotograafia, API kvaliteedikontroll.
2.2.1 Planeeringu-kõrguse põhjendus aerofotograafia jaoks
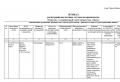
Nõuded plane-kõrguse põhjendusele (PVO) UAV-dega aerofotograafia puhul on toodud tabelis 2.1.
Tabel 2.1. Nõuded plaani kõrguse põhjendamisele mehitamata õhusõidukitega pildistamisel
2.2.2 Aerofotograafia välitööd
Operaator määrab maapealse juhtimisjaama (GCS) abil uuringuala ja vajaliku ruumilise eraldusvõime. Programm arvutab lennumissiooni ja kontrollib selle teostatavust. Lennuülesande arvutamise näide Geoscan Planner 2.1 tarkvaras on toodud joonisel 2.1.
UAV lennujuhtimisprogramm võimaldab teil täita järgmisi funktsioone:
tööpiirkonna joonistamine kohandatud kaardile;
UAV lennumarsruutide arvutamine algandmete põhjal;
lähtudes loodud keskjuhtimiskeskuse mõõtkavast ja maastikulõigu kõrgusest UAV lennukõrguse arvutamine;
digikaamera parameetrite järgi aerofotode piki- ja põiksuunalise kattuvuse suurus, reljeefi maksimaalne ja minimaalne kõrgus võttealal, tuule kiirus ja suund - lennuaja arvestus, piltide arv võtteala kohta, UAV liikumiskiirus, laskmise intervallid;
kui on vaja sooritada mitu lendu kogu uuringuala katmiseks, samuti kui UAV start ja maandumine tuleb läbi viia erinevatest stardipositsioonidest, siis jagage uuringuala eraldi osadeks.
Lennumissioon laaditakse drooni autopiloodi.
Joonis 2.1 – Lennuülesande arvutamise näide Geoscan Planner 2.1 tarkvaras
UAV stardi- ja maandumispunkti valimise protseduur on järgmine:
lähtepunkt peaks asuma uuritavatest objektidest minimaalsel kaugusel;
määrata marsruudi suund maapealse juhtimisjaama suhtes ja tagada, et sellel suunal ei oleks takistusi, et tagada otsene raadionähtavus;
määrake stardisuund ja veenduge, et selles suunas ei oleks takistusi;
veenduge, et maandumisalal ei oleks takistusi; sel juhul tuleb arvestada, et seade maandub vastutuult, koordinaatide püüdmise punktiks on langevarju avamise punkt automaatmaandumisrežiimis ja hädamaandumine side katkemise korral;
UAV ohutuks käivitamiseks ja maandumiseks ei tohi olla takistusi: hooned, mastid, tornid, tehasekorstnad kõrgusega üle 50 m 500 m kaugusel;
maandumiskoht valitakse stardipunkti lähedal, võttes arvesse võimalust visuaalselt kontrollida UAV lähenemist ja maandumist;
UAV maandumiseks valitakse tasane maastikuala, mille läbimõõt on vähemalt 50 m ja mille murupind ei ületa 1 m; saidil ei tohiks olla esemeid, mis võivad neile maandumisel toiteallikat kahjustada
Mehitamata õhusõiduk lastakse õhku katapuldilt (joonis 2.2) ning see tõuseb automaatselt õhku, jõuab juhtploki etteantud kõrgusele ja asub täitma lennumissiooni.
Lennu ajal pildistatakse automaatselt ja pildistamiskeskused määratakse GPS/GLONASS vastuvõtja abil. Maapealne operaator saab võrgus telemeetriaandmeid (koordinaadid, kõrgus merepinnast, veeremine, kõrgus jne). Sülearvuti ekraanil kuvatakse kõik parameetrid ning operaator jälgib töö edenemist võrgus ning saab ka ülesannet igal ajal muuta.

Joonis 2.2 – UAV käivitamine
Lennumissiooni sooritamisel laskub mehitamata õhusõiduk juhtploki määratud kõrgusele ja laseb välja langevarju (joonis 2.3) ning toimub pehme maandumine. Tehnilisest küljest on langevarju kasutamine kõige turvalisem viis maandumiseks ettevalmistamata kohas, tagades purilennuki ja pardavarustuse ohutuse ning võib oluliselt pikendada purilennuki kasutusiga.

Joonis 2.3 – UAV maandumine
Kohe pärast maandumist on võimalik saada tehtud töö esialgne tulemus. Aerofotod laetakse sülearvutisse, kuhu on installitud PhotoScan tarkvara ning teostatakse 3D maastikumudeli, ortomoosilise ja digitaalse maastikumudeli eeltöötlus ja konstrueerimine (joonis 2.4).

Joonis 2.4. Saadud andmete eeltöötlus
Ploki paigutuse loomisel kuvatakse iga aerofoto digikaardil. Aerofotode asukoha kaardil ja nende mõõtkava määravad aerofoto keskpunkti koordinaadid, pildistamise hetkel saadud asimuutnurk ja kõrgus merepinnast vastavalt parda-GPS vastuvõtja andmetele.
Plokkide paigaldamise tulemuste põhjal hinnatakse järgmisi parameetreid:
lünkade olemasolu aerofotodel marsruudil (aerofoto loetakse puuduvaks, kui külgnevate aerofotode pikisuunaline kattuvus on väiksem kui ette nähtud);
aerofotode mõõtkava kõrvalekalle määratust (mitte rohkem kui 5%);
aerofotode piki- ja põikisuunaline kattumine;
marsruutide sirgus (marsruutide sirguse kontrollimiseks paigaldatakse iga marsruut piki algsuundi; marsruudi otstes asuvad aerofotode põhipunktid on ühendatud sirgjoonega, millest mõõdetakse läbipainde noolt (kaugus sirgjoon sellest kõige kaugema põhipunktini).
kahe kõrvuti asetseva marsruudi kaadri pikisuunaliste kaldenurkade suurus ja vastastikused põiksuunalised kaldenurgad kahe kõrvuti asetseva marsruudi aerofoto kattuval osal on järgmised: kaldenurgad ei tohiks ületada 3° (arv 3° kaldenurgaga aerofotosid on lubatud teha mitte rohkem kui 10% aerofotode koguarvust uuringuplatsil;
viga digikaamera paigaldamisel triivi nurga all (mitte rohkem kui 6°).
- Mis tüüpi droone on olemas?
- Milline UAV sobib teie probleemide lahendamiseks?
- Mille poolest erinevad mehitamata õhusõidukite tüübid üksteisest?
UAV-de kasutamise võimalused on praegu väga laiad: alates õhust videovalvest ja kunstilisest filmimisest kuni tööstusrajatiste kontrollimiseni ja kaardistamiseni. Lisaks kasutatakse droone sageli mittetriviaalsete ülesannete lahendamisel, nagu metsloomade vaatlemine nende loomulikus elupaigas, vulkaanide või liustike uurimine, otsingu- ja päästeoperatsioonide läbiviimine ja paljud teised. UAV-d klassifitseeritakse sõltuvalt nende disainist, mis omakorda mõjutab nende lennuomadusi.
Millistele mehitamata õhusõiduki omadustele peaksite valimisel tähelepanu pöörama
Sobivaimat UAV-tüüpi valides on peamine otsustada, milliseid ülesandeid sa drooni abil lahendama hakkad, mida vajad: kiirust ja pikamaa või manööverdusvõimet ja täpsust. Kui olete otsustanud, millist tüüpi mehitamata õhusõidukid teile sobivad, sõltuvad ülejäänud valikukriteeriumid sellest, millist tüüpi tööd drooni ostate. Vaatame mõningaid põhiomadusi, millele peaksite UAV-i ostmisel tähelepanu pöörama.
See on mehitamata õhusõidukite üks põhiomadusi, mis määrab, kui palju ala ühe lennu jooksul pildistada saab ja seega ka töö majandusliku efektiivsuse. Sama klassi mudelitel on sageli ligikaudu sama lennuaeg. Oluline on mõista, kuidas seda hindamist tehakse. Tavaliselt näidatakse maksimaalset lennuaega kõige soodsamates tingimustes (täielik rahu, temperatuur +20 °C). Mõned ettevõtted avaldavad klientide meelitamiseks lennuaegu ilma kandevõimeta (kaamerata). Pärast kasuliku koormuse paigaldamist saab selliste UAV-de lennuaega vähendada kuni 50%. Seetõttu on kõige parem enne ostmist nõuda tootjalt drooni demonstratsiooni, et täpselt kindlaks teha, kui kaua see õhus püsib. Lennuaega tuleks arvestada kasuliku koormuse ja stardimassiga. Erinevate kandevõimete ja lisaseadmete paigaldamise võimalus sõltub kandevõimest. Seadme kaal mõjutab UAV-i stabiilsust õhus, seega mida raskem see on, seda stabiilsem on selle trajektoor ja seda kvaliteetsem on saadud kujutised.
![]()
Geoscan UAV-d lendavad pikka aega
Geoscan droonide loomisel püüavad meie insenerid saavutada rekordilise lennukestuse. Nii suudab Geoscan 401 kvadrokopter, millel Venemaal analooge pole, õhus püsida kuni 60 minutit. Geoscan 201 on lennukitüüpi droon, mis on võimeline lendama kuni 180 minutit, filmides ühe lennuga kuni 22 km2.
Drooni saab varustada erinevat tüüpi kandevõimega: foto- või videokaamera, termokaamera, magnetomeeter, gaasianalüsaator või laserskanner. Kasuliku koormuse tüüp ja ka UAV tüüp tuleks valida ülesannete ja saadavate andmete põhjal. Topograafiliste, geodeetiliste ja maakorraldustööde puhul peavad mõõdistusmaterjalid vastama regulatiivsele dokumentatsioonile. Nõutava kvaliteedi saavutamiseks on vaja kasutada ülitäpseid GNSS vastuvõtjaid ning pildistada suure maatriksi ja keskse katikuga kaameratega. Kui suurt täpsust ei nõuta, võite kasutada odavamaid kaameramudeleid ja teha ilma ülitäpse navigatsiooniseadmeteta.
Paljusid mehitamata õhusõidukeid saab varustada erineva kandevõimega, kuid mitte kõik neist ei toeta operaatorivahetust. Kui valite vahetatava kandevõimega UAV, siis veenduge, et asendamine ei nõuaks lisatööriistu ning elektroonika tuvastaks automaatselt kandevõime tüübi ja saaks seda juhtida ilma täiendava seadistamise või uuesti vilkumiseta.
Kui valite drooni põllumajanduse jaoks, vajate kaamerat, mis suudab pildistada lähi-infrapuna levialas. See on vajalik taimestiku seisundiindeksite (nt NDVI) arvutamiseks. Teine populaarne kandevõime tüüp on termokaamera. See võimaldab teil vastu võtta foto- ja videopilte soojusvahemikus. See võib olla kasulik küttevõrkude lekete leidmisel, kõrgepingeliinide rikete tuvastamisel või reovee väljalaskekohtade tuvastamisel.
![]()
UAV Geoscani kasulikud koormused
Geoscani mehitamata õhusõidukitele on saadaval mitmeid kasulikke koormusi, mis võivad lahendada palju probleeme. Siia kuuluvad kaamerad nähtavas piirkonnas pildistamiseks ja multispektraalkaamerad ja güroskoopstabiliseeritud platvormid koos videokaamera või termokaameraga ning erilahendused panoraamide pildistamiseks ja isegi FullHD videokanal. Kui te meie juurest sobivat kandevõimet ei leia, oleme alati valmis selle spetsiaalselt teie jaoks projekteerima ja valmistama.
On väga oluline, et mehitamata õhusõiduk oleks töökindel, kaasaskantav ega vajaks pikalt käivitamiseks ettevalmistamist. Töökindluse määravad eelkõige kasutatavad materjalid. Need peavad olema piisavalt kerged ja tugevad, et taluda lennuga kaasnevaid pingeid ja, mis veelgi olulisem, maandumisel tekkivaid pingeid.
Komposiitmaterjalid tagavad vajaliku jäikuse ja tugevuse, kuid ei pruugi olla painduvad ega vastupidavad löögikoormustele. Polümeermaterjalid taluvad lööke, ei purune deformeerumisel ja säilitavad oma kuju, kuid ei suuda tagada konstruktsiooni jäikust Seetõttu on kõige optimaalsem polümeeride ja komposiitmaterjalide kombineeritud kasutamine.
UAV kaasaskantavus saavutatakse selliste lahendustega nagu kokkupandav raam või modulaarne disain. Kõige mugavamad droonid on need, mida saab panna vastupidavasse transpordikohvrisse ja transportida auto pagasiruumi. Ühe operaatori drooni lennuks ettevalmistamiseks kuluv aeg ei tohiks ületada mitut minutit.
![]()
Geoscan UAV-d on usaldusväärsed
Esimesena Venemaal lõime vahustatud polüpropüleenist eemaldatavate tiibadega sarja. See muudab need maandumisel põrutuskindlaks ja lihtsustab remonti põllul. Kvadrokopteri kerge ja jäik raam on valmistatud süsinikkiust. See talub suuri koormusi ja raskeid töötingimusi. Samal ajal võimaldab spetsiaalne voltimismehhanism transportimisel saavutada maksimaalse kompaktsuse.
Lennuki tüüpi mehitamata õhusõidukite puhul on kaks võimalust startida – käest ja katapuldist ning maandumiseks kaks võimalust – langevarjuga ja kerele. Katapuldilt starti peetakse õigustatult operaatori jaoks kõige ohutumaks ning langevarjuga maandumine on drooni jaoks kõige õrnem. Mitme rootoriga UAV peamine omadus on vertikaalne õhkutõus ja maandumine. See võimaldab neil õhku tõusta ja maanduda mis tahes suhteliselt tasasel pinnal.
UAV valimisel tuleb arvestada operaatori, inimeste ja ülelennatava vara ohutusega. Parim on valida droonid, millel on läbimõeldud kasutusjuhend ja sisseehitatud turvafunktsioonid. Selliste funktsioonide hulka kuuluvad hoiatussüsteem aku taseme ja raadioside kvaliteedi kohta, lennuülesande teostatavuse automaatne kontroll ja automaatne naasmine lähtepunkti side katkemise või aku kriitilise tühjenemise korral.
Teine oluline funktsioon on võimalus määrata maksimaalne kaugus alguspunktist. See võimaldab teil luua virtuaalse perimeetri, millest kaugemale UAV lennata ei saa. Sellega tagatakse vara ja inimeste ohutus võtteplatsiga külgnevatel aladel. Turvaelementide olemasolu vähendab oluliselt riske mehitamata õhusõidukite käitamisel.
![]()
Geoscan UAV on ohutu ja mugav
Kõik Geoscani lennukidroonid tõusevad õhku katapuldilt ja maanduvad langevarjuga, tagades operaatori ja UAV ohutuse. Meie autopiloot ja maapealne juhtimisjaam toetavad ülaltoodud vastupidavuse funktsioone. Kõik see muudab Geoscani UAV-d üheks ohutumaks ja mugavamaks kasutamiseks.
Teine UAV oluline omadus on ilmastikutingimused, mille korral on võimalik lennata ja saada ka kvaliteetseid uuringutulemusi. Tuule kiirus, sademed ja õhutemperatuur võivad teie võimalusi oluliselt piirata, kui ostetud droon on loodud lendamiseks vaid ideaalilähedastes tingimustes.
Tõsise töö jaoks peaksite valima professionaalsed seadmed, mis on mõeldud kasutamiseks laias temperatuurivahemikus ja taluvad märkimisväärset tuulekiirust.
Ja kui kavatsete drooni kasutada karmides tingimustes, näiteks kõrgel mägedes, väga madalal või kõrgel temperatuuril, siis tõenäoliselt vajate spetsiaalselt nende tingimuste jaoks kohandatud UAV-mudelit.
![]()
Kus Geoscan UAV-d lennata saavad
Meie seadmed on loodud töötama temperatuuridel -20 °C kuni +40 °C. Maksimaalne tuule kiirus, millega saab lennata: 12m/s. Seetõttu on meil kogemusi üle Venemaa, aga ka Mongoolias, Kasahstanis, Kreekas ja Mehhikos.
UAV kõige olulisem osa on maapealne juhtimisjaam (GCS). Selle funktsionaalsus määrab suuresti drooni enda võimalused.
Esiteks peaks NSO pakkuma mugavaid tööriistu lennumissiooni loomiseks. Aerofotograafia lennumarsruut tuleks luua automaatselt kasutaja määratud uuringupiirkonna jaoks. Lisaks peaks olema võimalik määrata vajalik eraldusvõime ja pildi kattuvuse protsent, lennukiirus ja maandumispunkt. Kui NSO-l sellist funktsionaalsust pole, on aerofotograafia korralikult sooritamine peaaegu võimatu.
Vahepeal pole maapealset juhtimisjaama vaja mitte ainult lennumissiooni loomiseks, vaid ka UAV juhtimiseks lennu ajal. NCS-i abil saab operaator jälgida lennumissiooni täitmist, ära kasutada võimalust lennata kindlaksmääratud punktidesse või kontrollida kasulikku lasti ning vajadusel missiooni tühistada. Lisaks edastavad paljud videovalve UAV-d kaamera pilti monitori ekraanile reaalajas.
![]()
NSU Geoscan
Geoscan NSU abil saate juhtida piltide ruumilist eraldusvõimet, kattuvuse protsenti, lennukiirust ja muid olulisi pildistamisparameetreid. Süsteem kontrollib automaatselt koostatud lennuplaani teostatavust ja pakub vajadusel selle mitmeks osaks jagamist. Samuti näete reaalajas UAV asukohta, trajektoori ja telemeetriat ning saate seda lennu kõikidel etappidel täielikult juhtida.
Isegi kõige detailsemad ja kvaliteetsemad aerofotod jäävad vaid kauniteks piltideks ilma fotogrammeetrilise töötluseta. Digitaalse kõrgusmudeli, 3D-punktipilve ja ortomosaiigi hankimiseks vajate spetsiaalset tarkvara. UAV uuringumaterjalidega töötamiseks on erinevaid tarkvaratooteid, mis kõik pakuvad ligikaudu sama väljundandmete kogumit. Kuid töötlemise kiirus ja tulemuste kvaliteet võivad oluliselt erineda. Et vältida pettumust ebarahuldava välimusega ortomosaiigi ja töötlemata 3D-mudeli tõttu, on parem kasutada tõestatud, hästi tõestatud tarkvara.
Piltide ruumilise asukoha täpseks määramiseks kasutatakse UAV navigatsiooniseadmete salvestatud pildistamiskeskuste koordinaate. Seetõttu tasub tähelepanu pöörata sellele, kas fotogrammeetriline tarkvara toetab nende andmete importimist Sinu droonist. Ideaalne olukord on, kui mehitamata õhusõidukid ja fotogrammeetrilise töötluse tarkvara kavandatakse algusest peale koos töötama ja integreeritakse ühtsesse töövoogu.
![]()
Geoscan tarkvara
Geoscan UAV on varustatud professionaalse fotogrammeetrilise pilditöötluse ja 3D-mudelite loomise programmiga. Lisaks pakume 3D analüüsiks ja saadud andmete visualiseerimiseks. Geoscani komplekside kasutamiseks ei pea te olema GIS-i ja fotogrammeetria ekspert. Meie tarkvara lahendab kõik töötlemisraskused, pakkudes teile mugavaid mõõtmis- ja analüüsitööriistu.
UAV valimisel on oluline tegur selle hind. Loomulikult tunduvad mudelid, mille hind on madalam, atraktiivsemad. Kuid te ei tohiks drooni maksumust ülaltoodud omadustest eraldi arvestada.
Peaksite pöörama erilist tähelepanu sellele, mida te oma raha eest täpselt saate. Kas tootja pakub koolitust, tehnilist tuge ja garantiid? Kas fotogrammeetria tarkvara on komplektis või pean selle eraldi ostma?
Pidage meeles ka kasutus- ja hoolduskulusid. Sellest vaatenurgast on kasulikum osta moodulseadmeid, kuna selle eraldi osa asendamine või parandamine on üsna lihtne ja odav. Kogu kerelahenduse puhul tuleb kogu UAV remonti saata, millega kaasnevad lisakulud.
Droonide hindade võrdlemisel tasub võrrelda nende hooldatavust, varuosade saadavust ja komponentide deklareeritud kasutusiga. Kui põllul ei ole võimalik väiksemaid remonditöid iseseisvalt teha, võib väike rike võttepäeva segada. See tähendab tegemata töid ja seadmete seisakutest tingitud rahakaotust.
![]()
Mis on Geoscani komplekside hinna sees
Ostes meilt filmimissüsteemi, saad kõik aeropildistamiseks vajaliku: UAV, juhtimissüsteemi, ümbrised, laadija, varuosade komplekti, tarkvara. Kompleksi maksumus sisaldab ka individuaalset koolitust mehitamata õhusõidukite ja fotogrammeetrilise töötlemise tarkvaraga töötamiseks, mille järel saab töötaja kohe tööle asuda. Kõik tarned on garanteeritud
Järeldus
Selleks, et valida droon, mis ennast ära tasub ja kasumit toob, veendu tulemuste kvaliteedis, töökindluses ja jõudluses. Ideaalne mehitamata õhusõiduk peaks olema hõlpsasti kasutatav, kaasaskantav ja pakkuma stardiks kiiret ettevalmistust. See peaks pakkuma valikut mitme kasuliku koorma tüübi vahel, omama intuitiivseid juhtnuppe ja integreeruma professionaalse fotogrammeetrilise tarkvaraga.